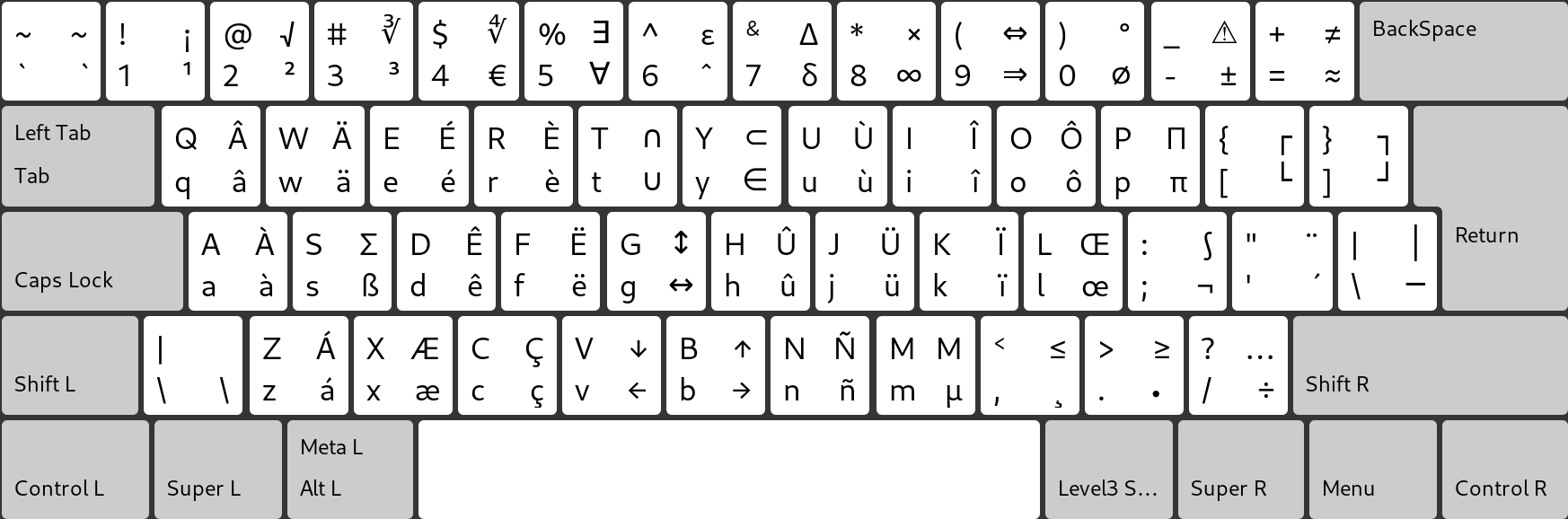
A great QWERTY Keyboard layout for english + french (+spanish and german)

Calcul des probas des Tirages au Sort des 1/8ème de Finales C1 ou 1/16ème de Finales C3
The HEX board game
|
A great QWERTY Keyboard layout for english + french (+spanish and german) |
|
Calcul des probas des Tirages au Sort des 1/8ème de Finales C1 ou 1/16ème de Finales C3 |
|
The HEX board game |
| A fading-up ringtone with very loud volume (after a long ramp-up), nice for pagers |